Control moment gyroscope by ECP
Skočit na navigaci
Skočit na vyhledávání
Educational four-axis control moment gyroscope - Model 750 from Educational Control Products (ECP).
Link to the product web page on the producer's site
Located currently at K26 lab.
Troubles:
- the system is provided with the so-called turnkey solution, which means that besides the model itself, an amplifier and also the software was delivered.
Student projects finished with the system:
MATLAB® Controll using Real-Time Windows Target® and Humusoft Control Board
Individual Project
Krištof Pučejdl
Motivation:
- Dedicated control software provided by ECP is very outdated. It requires old 32 bit processor architecture and the user interface does not match today's standards.
- Most of the control models being used in education are controlled via MATLAB® using universal Humusoft® control board. Using the same board to control different models is way more flexible and allows switching the controll PC's without need of hardware changes.
Goals:
- Find the correct setup of Humusoft® board according to pin-out specification provided by ECP.
- Set up and run the RTWT® communication in MATLAB®
- Describe the input values to actuators and output values from sensors.
- Experiment with regulators and feedback control.
1. Model Description
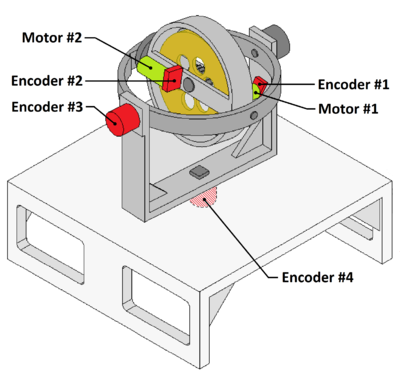
- ECP's four axis Control Moment Gyroscope consoist of revolving intertia disc mounted in three axis gimbal. Inertia disc rotation axis (#1) and the first (inner) gimbal axis (#2) are driven by servo motors (Motor #1, Motor #2), while the movement along each axis is measured by incremental sensors (Encoder #1-#4). Range of motion along the second axis is limmited by end-stop switches to about 300°. The other axis allows unlimited rotation.
- Positions of Encoders and Motors are displayed on Figure 1.

- Axis #3 and #4 are equipped with electromechanical breaks that are either operated manually via switches on Ampflier box or swiched on automatically by end-stop or inetria switches.
- With electromechanical breaks switched on, there is quite a lot of force required to induce movement along stalled axis. Nevertheless, with high angular velocity of inertia disc the gyroscopic effect easily creates sufficient amount of force.
- Another important fact regarding breaks is the impact on system behavior. With breaks switched off, the behavior is highly nonlinear. With use of constraints available through the breaks this behavior can be simplified to almost linear.
NOTE: Running high inertia disc velocity experiments with electromechanical breaks switched off is not recommended. The forces and momentum generated by gyroscopic effect could easily damage end-stop switches as well as whole plant.
2. Humusoft board setup
- Gyroscope Ampflier/Interface box uses 60-pin Flat Cable for connetnion with original ECP control board. 14 pins are used to provide power supply and data acces to four encoders (Encoder 1-4) and two Digital-to-analog converters that drive motors (DAC 1-2). All devices are described in previous section.
- Each Encoder requires 4 wires. Two for TTL Signal data on Channel A and B, one for power supply (+5 Volts) and one for ground. Power supply and ground are common for all four encoders.
- Each Motor requires 2 wires. One for input DAC Signal (input range +/-10 Volts) and one for ground.
- The original pin-out specification provided by ECP (on request) contained several errors. Following specification table is already corrected.
| Signal Description | Pin Number | Very Important Notes |
|---|---|---|
| Encoder 1 A Channel | 25 | TTL Signal |
| Encoder 1 B Channel | 21 | TTL Signal |
| Encoder 1 +5 V Power Supply | 1 | DO NOT MIX UP +5 Volt & Ground. Causes immediate damage to encoders. |
| Encoder 1 Ground | 3 | Encoder Power Common |
| Encoder 2 A Channel | 26 | TTL Signal |
| Encoder 2 B Channel | 22 | TTL Signal |
| Encoder 2 +5 V Power Supply | 1 | DO NOT MIX UP +5 Volt & Ground. Causes immediate damage to encoders. |
| Encoder 2 Ground | 3 | Encoder Power Common |
| Encoder 3 A Channel | 13 | TTL Signal |
| Encoder 3 B Channel | 9 | TTL Signal |
| Encoder 3 +5 V Power Supply | 1 | DO NOT MIX UP +5 Volt & Ground. Causes immediate damage to encoders. |
| Encoder 3 Ground | 3 | Encoder Power Common |
| Encoder 4 A Channel | 14 | TTL Signal |
| Encoder 4 B Channel | 10 | TTL Signal |
| Encoder 4 +5 V Power Supply | 1 | DO NOT MIX UP +5 Volt & Ground. Causes immediate damage to encoders. |
| Encoder 4 Ground | 3 | Encoder Power Common |
| DAC 1 Spin Motor | 43 | MAX +/- 10 Volts |
| DAC 1 Return | 58 | DAC 1 Common |
| DAC 2 Gimbal 2 Motor | 44 | MAX +/- 10 Volts |
| DAC 2 Return | 58 | DAC 2 Common |
This specification is used for setting up propper connection with Humusoft® board using two universal terminal boards (Humusoft® TB620).
3. Simulink® Control Driver Block
- Driver block used in RTWT block diagram (ECP_Gyroscope.slx) is displayed on Figure 2

- This block provides communication with propper Humusoft® board inputs and outputs. There is also +/-5 Volts saturation implemented on both inputs to protect the motors.
4. Range and meaning of input/otput values
Motor Inputs
- Numeric input to motors represents input voltage. Common range for both motor inputs (Motor #1, Motor #2) is +/-10. However, experiments proved that there is almost no additional increase of motor power for any value higher than 6. This threshold has been lowered by 1 in order to conserve the motors - Therefore the implemented saturation is +/-5.
Encoder Outputs
- Output from encoders represents numeric data from incremental sensors measuring the angle of rotation along each axis. Having no fixed reference setup to calculate zero position, the sensors counts from zero at the start of each simulation. For most of the experiments it is necessary to set the gyroscope into desired initial configuration manually. There is 0.0225 gain between encoder output value and value in degrees.